Autonomous Vehicles Safety Software
Autonomous Vehicles are the future of the automobile industry. The research and development are underway on these vehicles’ operations. Before the autonomous cars getting ready to launch in the market, its safety is necessary. These vehicles should be safe before participating in road traffic. There should be no threat to other cars or people from autonomous cars.
Road Safety
The researchers are continuously working hard to make these vehicles as much as safe as possible. Researchers are giving their best to create a safe and advanced standard vehicle for future use, in the efforts of the safety a new security software that will prevent accidents by predicting different variants of a traffic situation every millisecond. The software developed at the Technical University of Munich (T.U.M) improving the security and safety of the vehicle.
The road traffic conditions are very confusing and even sometimes dangerous. Many accidents happen on the road. Matthias Althoff, Professor of Cyber-Physical Systems at T.U.M, says that the acceptance of the autonomous vehicles by the public will occur if these vehicles can assure safety. The prevention of accidents in the confusing traffic conditions by these computer-aided vehicles will gain the confidence of the people.

New Software
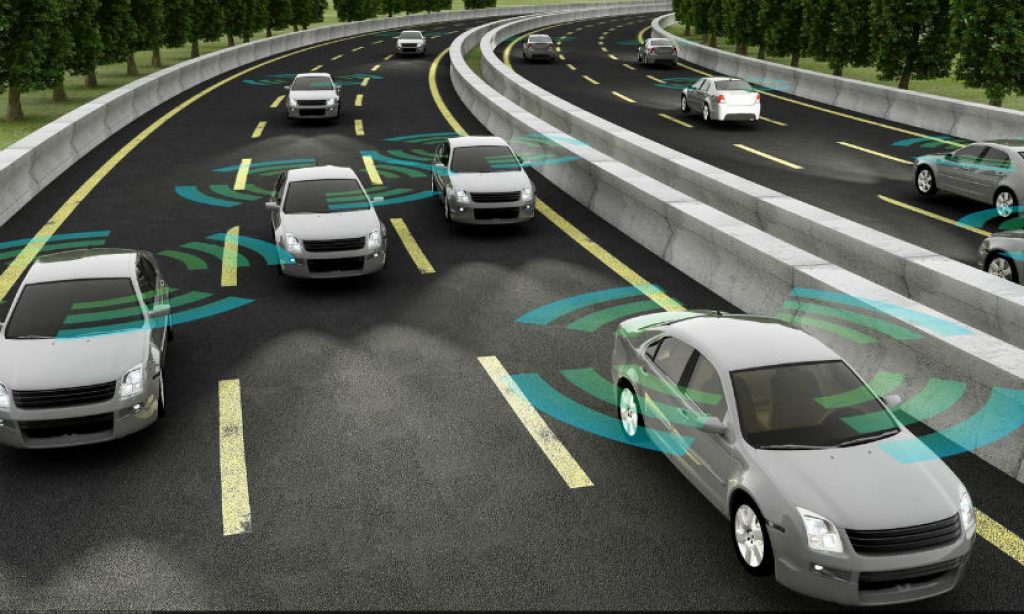
As the safety of people is the priority, the main aim is to make sure to prevent accidents using autonomous vehicles. Mr. Althoff, along with his team, succeeds in developing new software. This software permanently analyzes and predicts events while driving. Vehicle sensor records and evaluates the data every millisecond. The software can calculate all possible movements for every traffic participant — provided they adhere to the road traffic regulations — allowing the system to look three to six seconds into the future.
This future based system determines a variety of movements for the vehicle. On the other hand, this program calculates potential emergency maneuvers in which the vehicle moved out of harm’s way by accelerating or braking without endangering others. The autonomous vehicle may only follow routes that are free of foreseeable collisions and, for which an emergency maneuver option, identified.
Calculation Model
In the past, these real-time traffic calculations were not possible. The research team of Munich Techincal University has shown not only the theoretical possibility of real-time data analysis with simultaneous simulation of future traffic events: They have also demonstrated that it delivers reliable results.
The quick calculations made using the simplified dynamic models. So-called reachability analysis, to calculate potential future positions a car or a pedestrian might assume. When all characteristics of the road users, taken into account, the calculations become prohibitively time-consuming. That is why Althoff and his team work with simplified models. These are superior to the real ones in terms of their range of motion — yet, mathematically easier to handle. This enhanced freedom of movement allows the models to depict a larger number of possible positions but includes the subset of positions expected for actual road users.
Evaluation
For evaluating the real data collected in Munich by this team, using the autonomous vehicle. A virtual model base on the collected data created. Form this; they crafted the test environment that closely reflects everyday traffic scenarios.
Althoff Words
Using the simulations, we established that the safety module does not lead to any loss of performance in terms of driving behavior. The predictive calculations are correct; prevented accidents, and in emergencies, the vehicle demonstrably brought to a safe stop. The computer scientist emphasizes that the new security software could simplify the development of the autonomous vehicle because it combines with all standard motion control programs.
Reference
- Christian Pek, Stefanie Manzinger, Markus Koschi, Matthias Althoff. Using online verification to prevent autonomous vehicles from causing accidents. Nature Machine Intelligence, 2020; 2 (9): 518 DOI: 10.1038/s42256-020-0225-y

0 Comments